
01
HD-sEMG
HD-sEMG
Rehabilitation
Platform
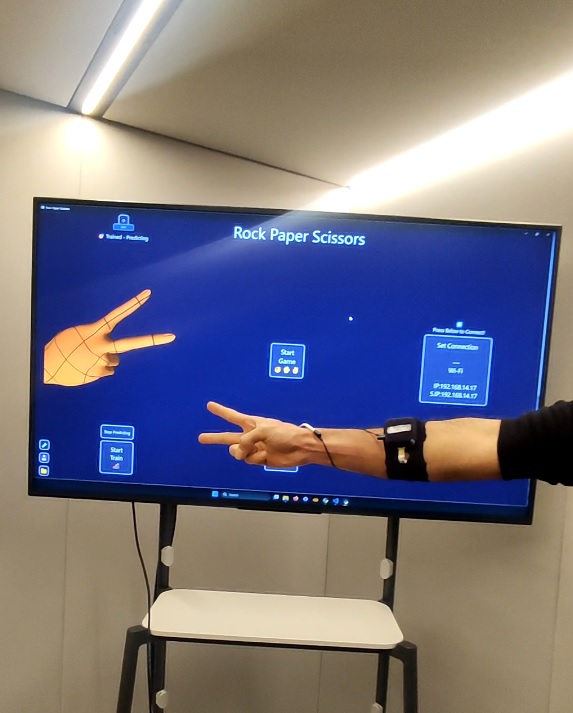
92.9% accuracy · 14 participants (7F, 7M) · 24 s protocol
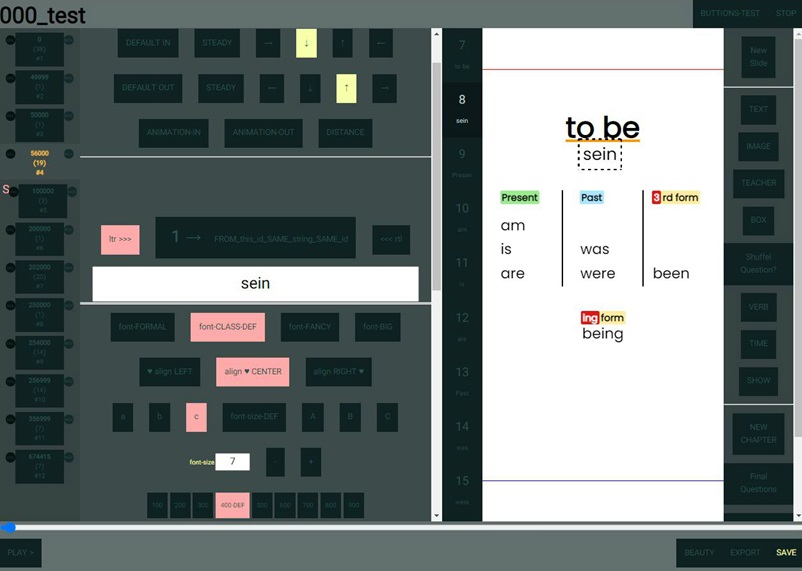
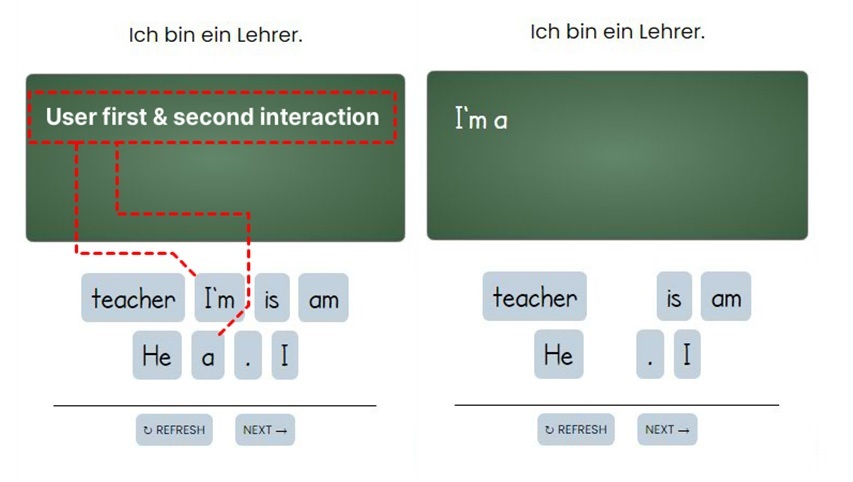
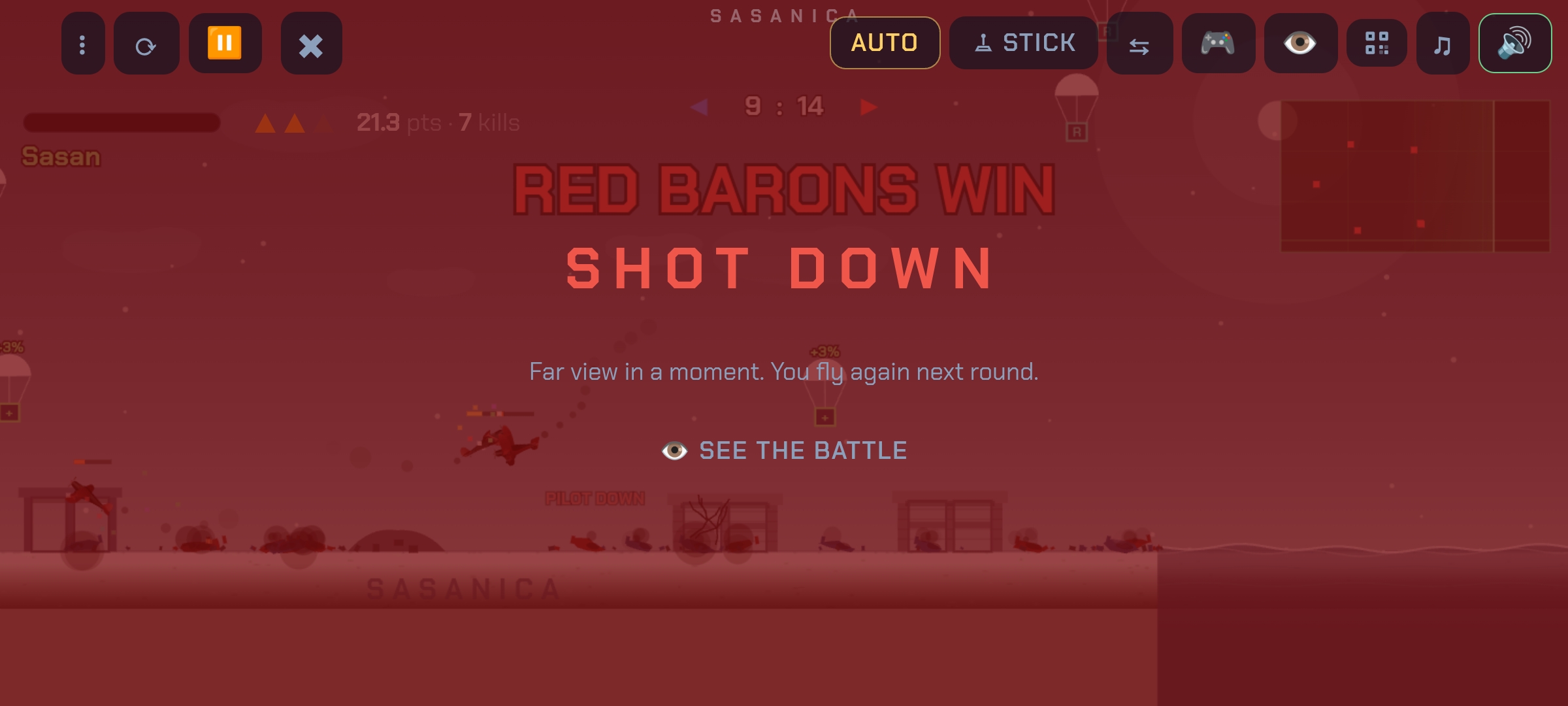
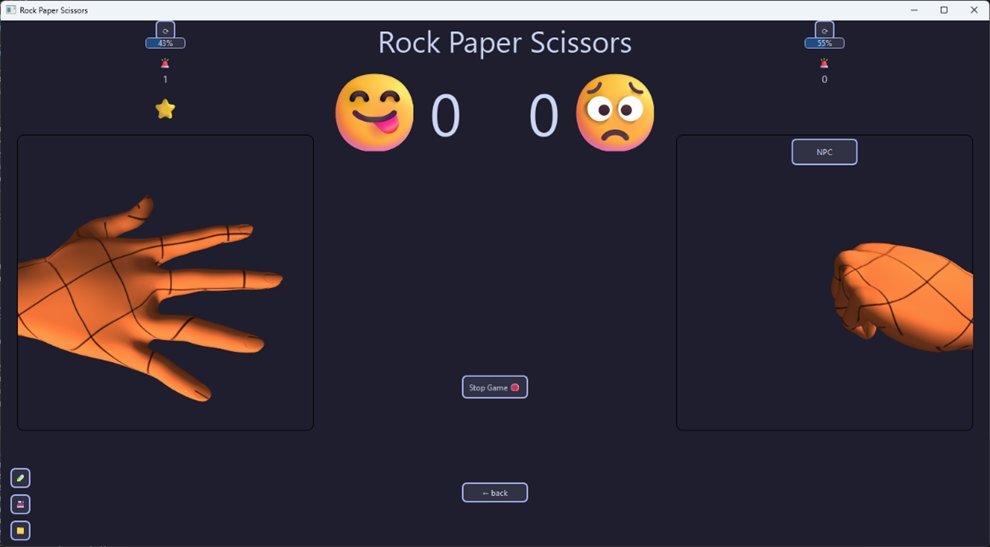
Prototyped and validated an end-to-end HD-sEMG gesture-recognition system with real-time inference and a live two-player game. First simultaneous multi-device OTB acquisition in the research group.
HD-sEMGCatBoostMTEOPySide6/QtBootstrap CI